
初めに,サムネは下記サイトからの転載です.削除依頼があったら差し替えます.

どらびです.
前回は大学時代の黒歴史?ノート公開第一弾という事でイヤホン自作についてのノートを公開しました.
こんな感じの雑なノートがたくさん残ってるんですよね…
でもただ処分するのも何かもったいない気もするのでネタに消化する企画第二弾です.
第二弾はパラレルリンクロボの自作記録です.これに関しては大学当時もそこそこ頑張ってましたし,最終的に修士はそれに関わりのある研究室に進んだので,無駄骨ではなかったわけですが,独学なのですごく遠回りをしたなという自覚はあります.
そんな記録のノート公開です.
ちなみに,製作したかったのは6軸のパラレルリンクロボットです.バグが残っているものの,LinuxCNCで動かせるように改造したコードとか残ってますので,興味がある人はご連絡いただければお見せしたりもできるかもです.
もう記憶がとぎれとぎれなので,github公開とかは(今のところ)考えてません.
という事で本編へ.
当時のノート
第一弾と同様にまずはノートをお見せします.今回は沢山あるので,飛ばしたい方は目次から気になる項へ飛んで頂ければ幸いです.
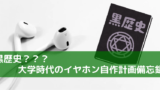
ツールチャックの模式図
当時,安価なオートツールチェンジャー(ATC)の自作ができないかと考えていて,そのためによくある機構を理解しようということで,たくさん調べて下のように図を描いたりしてました.
結局こんなもの作れる技量はなかったので諦めましたが…
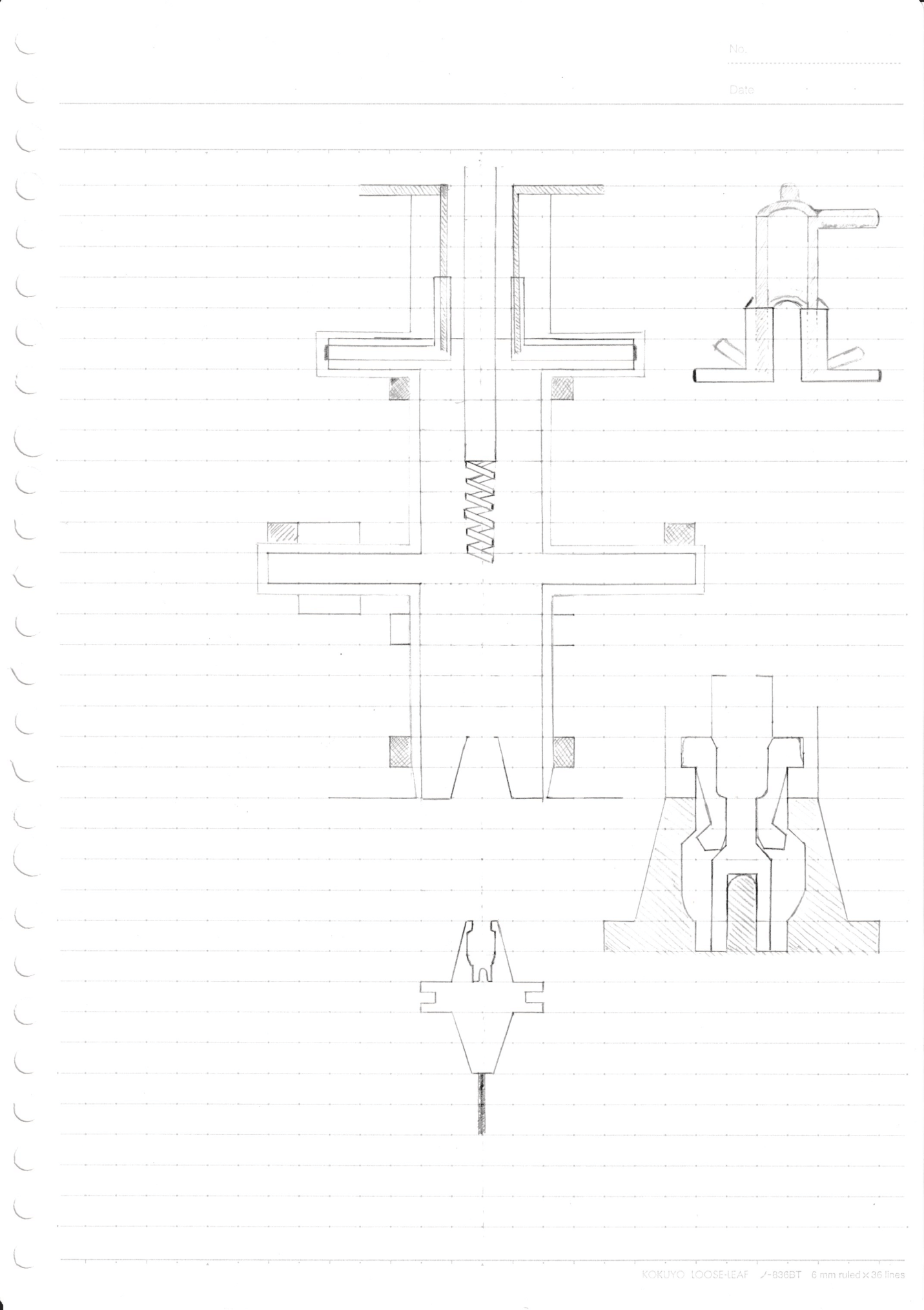
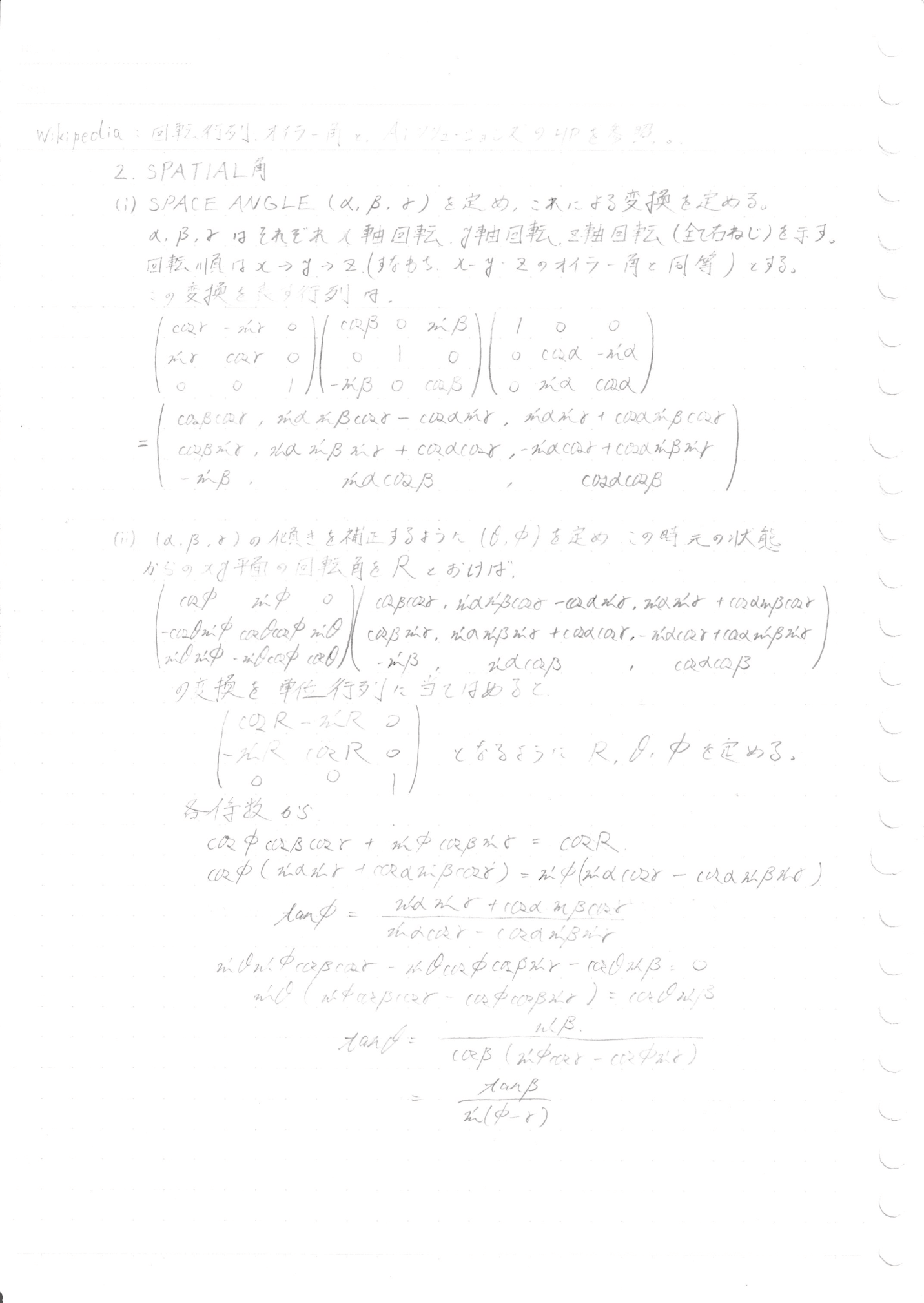
AC軸の自作案と制御のための計算
これも自作案です.5軸制御の手法として,後に挙げるhexa型のパラレルリンクロボットのほか,通常の3軸CNCに,2軸を追加する手法があります.というわけで,その追加2軸を自作する案を考えていました.当時高校だか大学の最初の方だったので,理解のために全部手計算でやってました.今のPCのリソースやライブラリ群なら,こんな面倒なことしなくても全部計算してくれます.行列の知識はもちろん必要ですが.

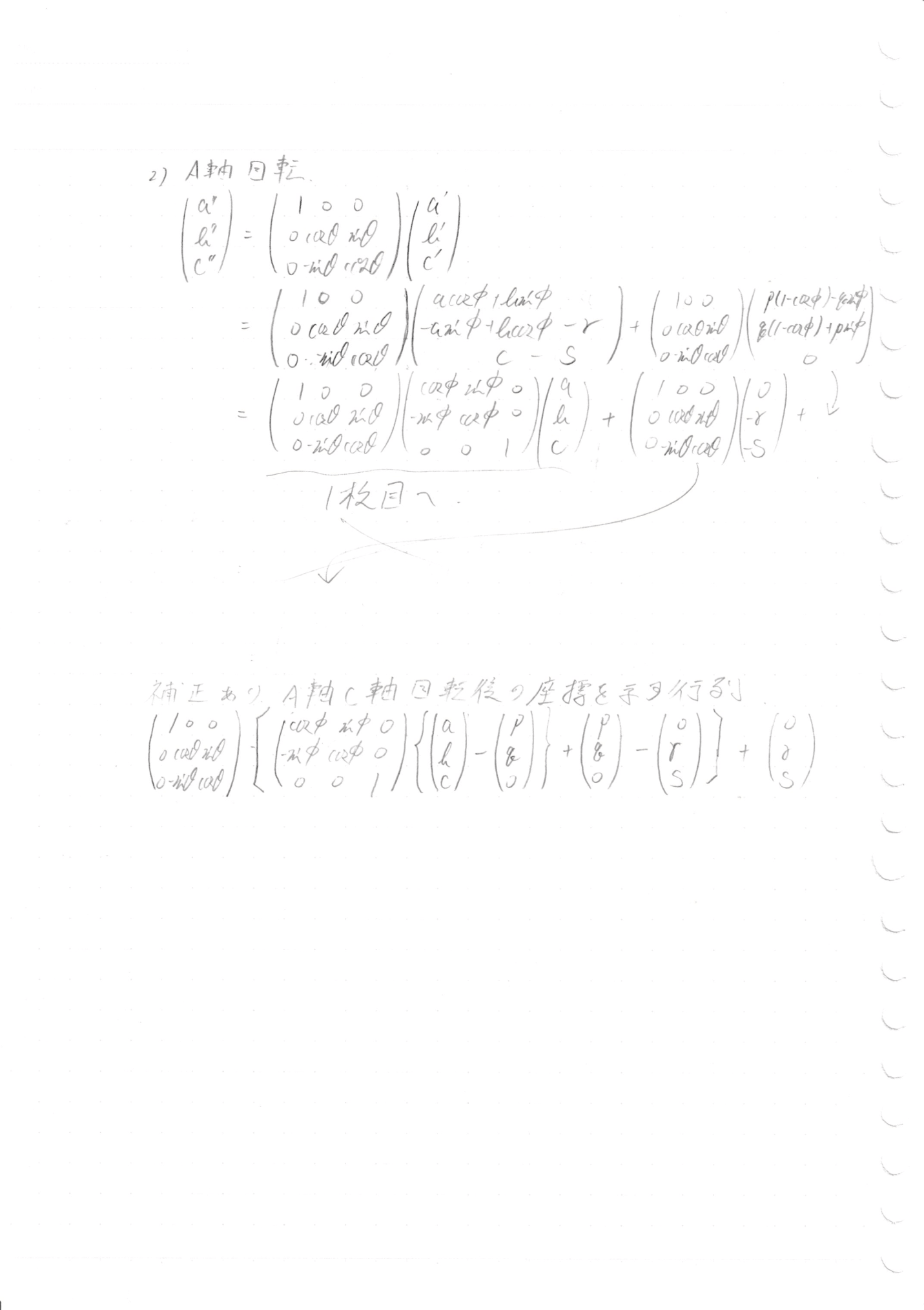
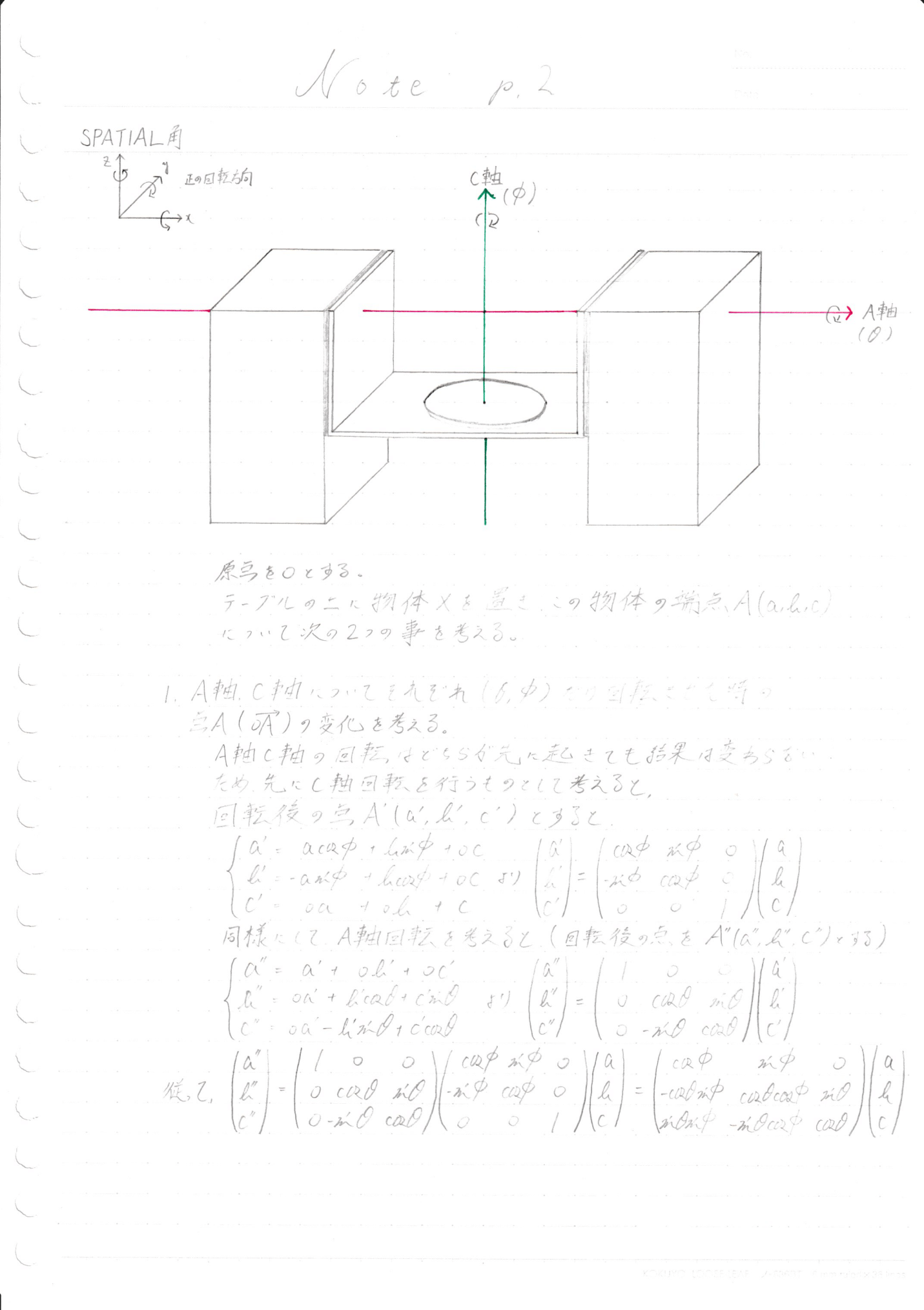
以下のはSPATIAL角という3軸回転の手法をメモしたものです.
正直今やるならクオータニオンを使うと思うので特にこれの必要性はないかと.
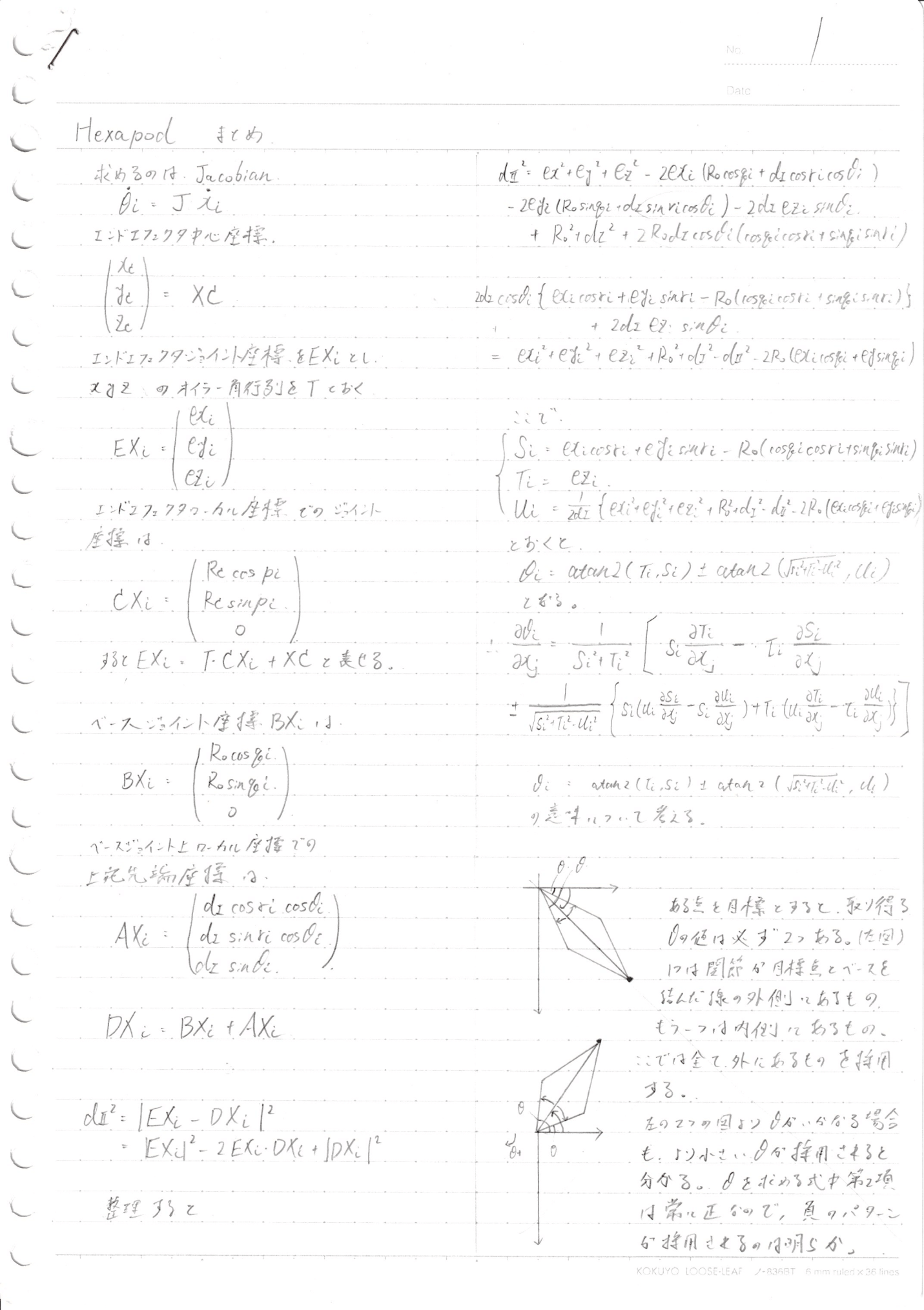
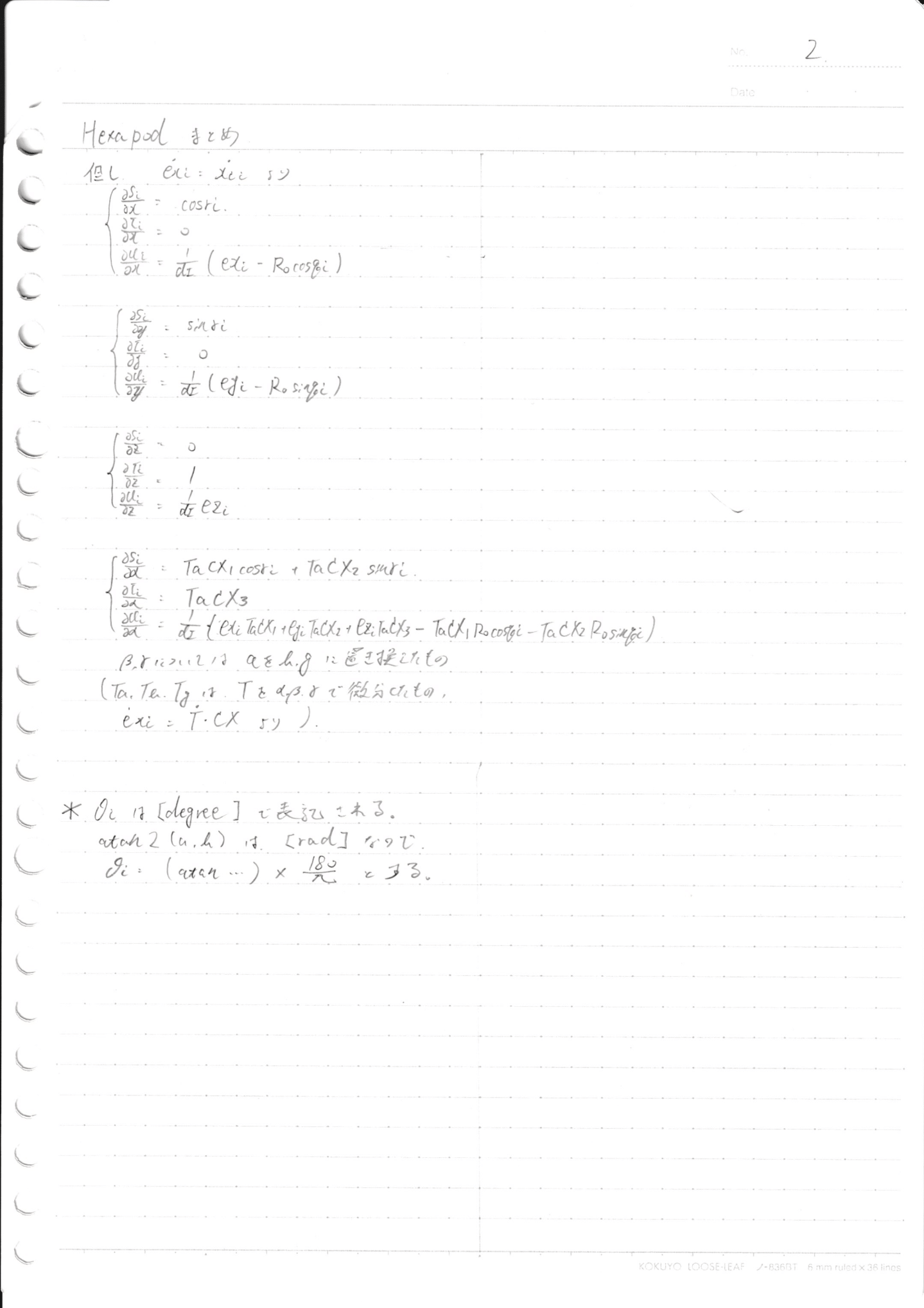
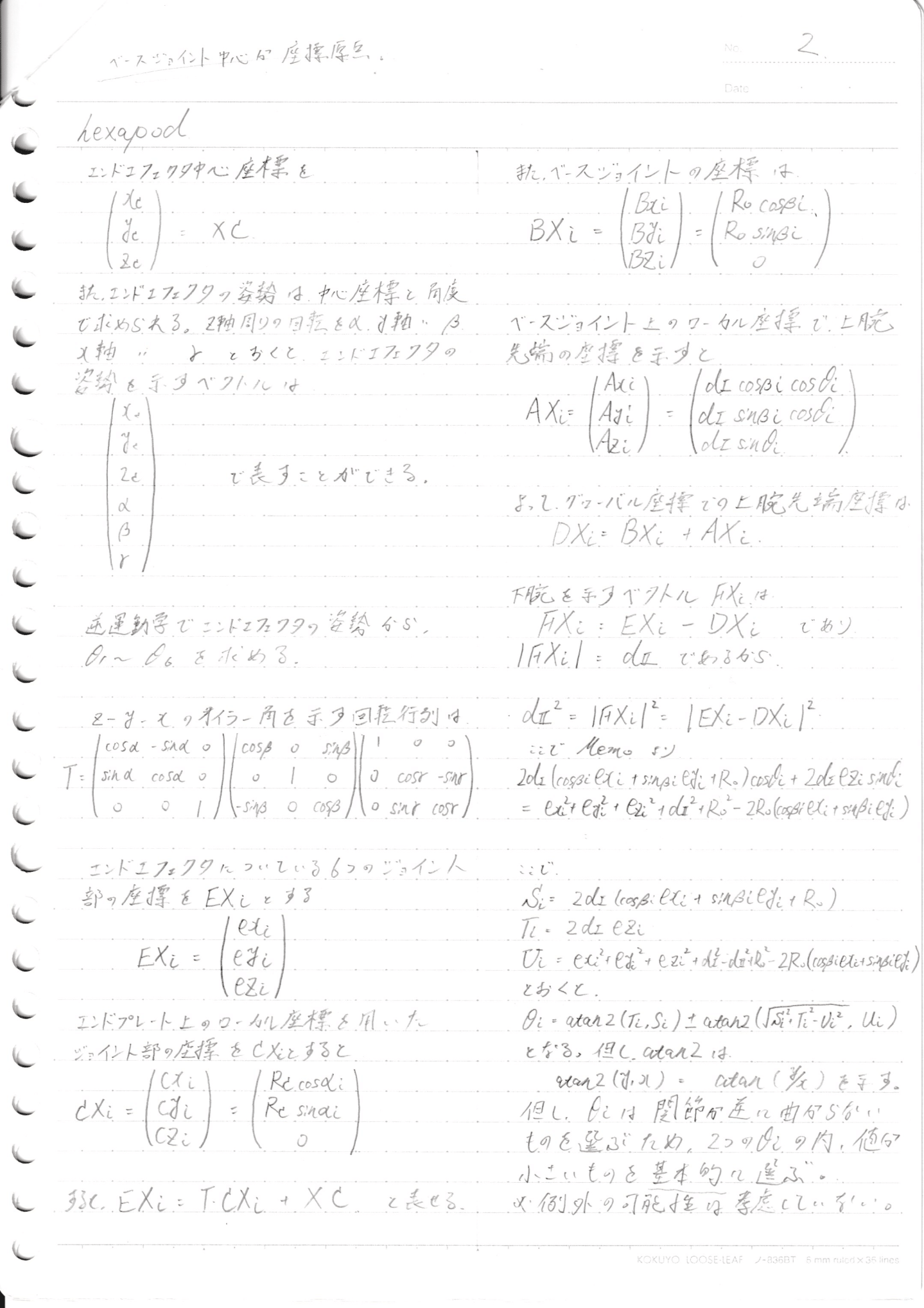
hexa型パラレルリンクロボットの逆運動学
これは大学2年くらいのものかな?最終的にはこれにかかわる研究室に進学したので,この計算は個人的には良い勉強になりましたが,これもプログラムで再現するときには細かい計算はすべて無視しても大丈夫です.概念は理解すべきでしょうが.
hexa型のパラレルリンクロボットは高速運動には向いていますが,CNCとしては向いてません.これの3軸型はデルタロボットと呼ばれ,ファクトリーオートメーションで大きな役割を果たしています.




Stewert型パラレルリンクロボットの逆運動学
上で書いたhexa型のパラレルリンクロボットよりも少し計算が楽なstewert型の計算もやってました.ちなみにこちらの方式の方が実は有名です.昔からフライトシミュレータなど,高荷重を受け止める用途で用いられており,CNCでパラレルリンク機構を使いたい場合はこっちがオススメです.いや,CNC自作する人そういないと思いますけど(笑)
市販でもあるんですよ.オークマが出してます.


まとめ
個人でパラレルリンクロボット,特にCNCとしての運用で作るのは相当ハードル高いです.作るのにCNC必須という矛盾を抱えます.
でも,パラレルリンク自体すごく面白い動きをするロボットなので,これを機に興味持ってもらえると嬉しいなあと思ったりします.
私が機械系の進路を目指した理由も,もともとは人型ロボットとかに興味があったのですが,最終的に進路を選ぶとなった時に,父の友人のバイク屋さんのおっさんが,「これ面白いよー」って見せてくれたのが5軸加工機の動画で,その動きに魅せられて産業機械の研究したいなーって思うようになりました.何が言いたいかというと,きっかけってそんなもんだと思うんです.
この記事を見て面白いなーって思ってくれる人が一人でもいればうれしいですが,正直昔のメモ見せられただけで面白いと思える人はもともとこの手の分野に興味がある人な気がするので,そうでない方はこのブログのほかの記事とかも覗いてみて,興味のありそうなもの探してみてもらえると嬉しいです.
それではー.
コメント