はじめに
ドローン、飛びました。
ハードウェアでは特につまずくところはなかったのですが、主にソフト面、というかGPSの設定で結構大変な苦労をしたのでその辺をつらつら書いていこうと思います。
昔のブログ記事等もかなり参考になったのですが、主にcleanflightの仕様変更による設定等の違いで私みたいな初心者は結構引っかかると思うんですよね。むしろだれも取り扱っていないことに驚愕です。初心者しか引っかからないのかなあ…
とりあえず何はともあれ設定出来そうな目処は立ったので記事にします。あとまだよくわかっていない点もあるので、その辺も書いておいて、有識者のコメントを待ちたいです。
ハード組み立て
写真はですね。作るのに夢中すぎてかなり忘れてます。かたじけない。まあ、語るほどの内容があるわけでもないのでサクッと行きましょう。画像数枚載せる程度ですが。パーツ選びについては以下の記事をご覧ください

まずは本体だけで1回組んでみましょう。いかんせんaliexpressでの購入なのでパーツ足りないとかありえますし、特に説明書がありません。多分ですがスペーサーは下に入ります。力の受け方を考えると。
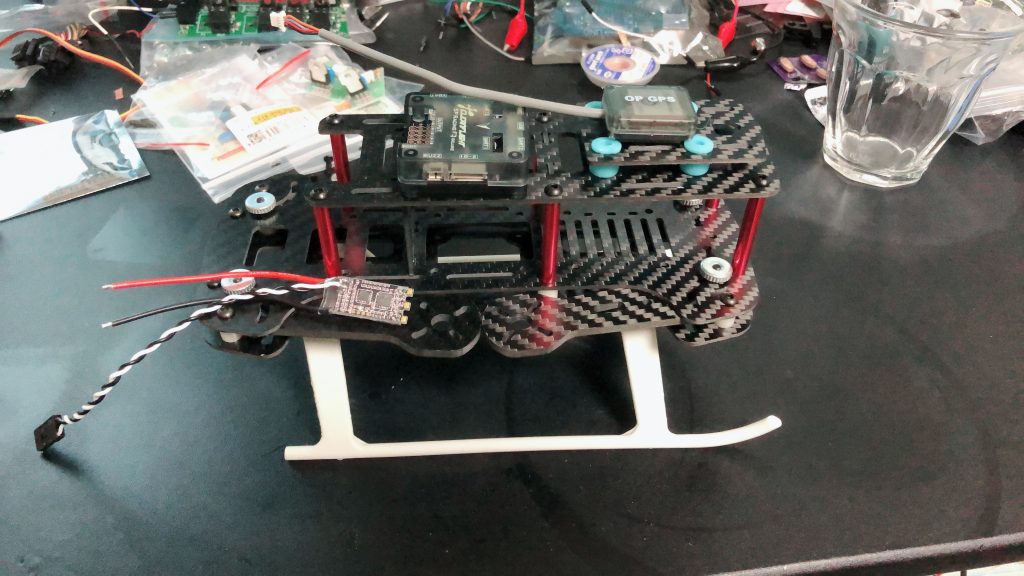
確認したら最下層部分以外はバラしましょう。そしたらモーターとESC、電源ボードを載せて、配置を決めましょう。
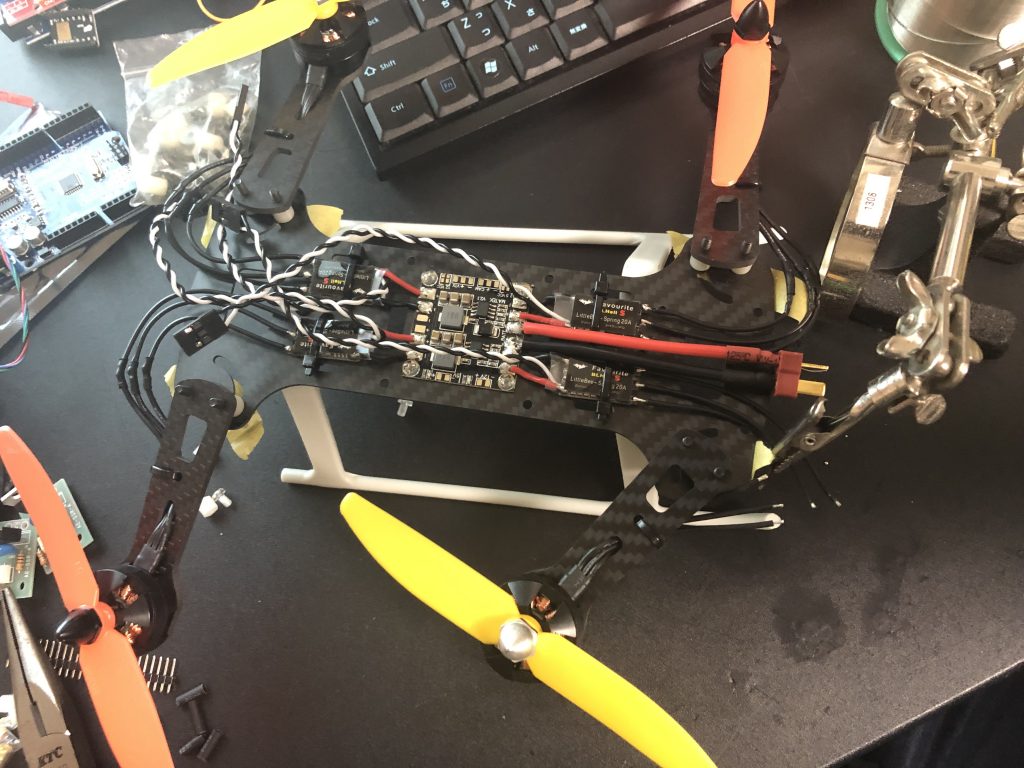
真ん中の正方形が電源の分配を担うボードです。バッテリーのコネクタと接続する太めの線2本をハンダづけして、あとはESC4つをそれぞれ配線してください。

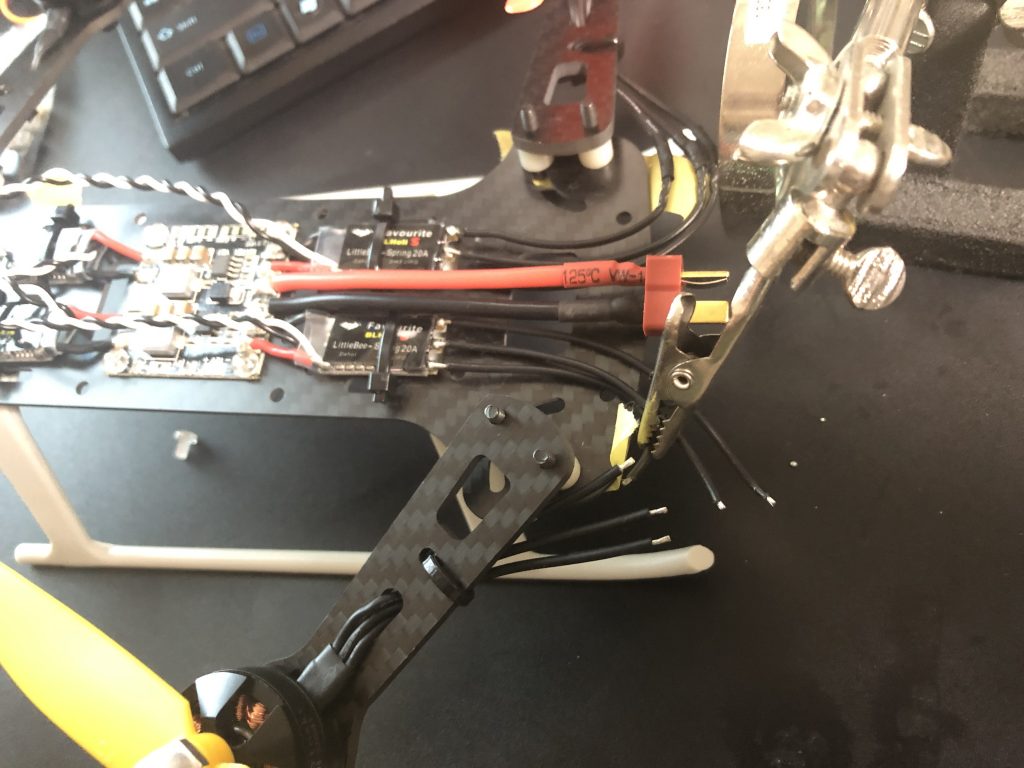
ESCは出口側から3本の線が出ているので、それをモーターに配線しましょう。3本の配線の仕方で正転逆転が変わるので、捻ったりしないで配線するのが吉です。組み立て切る前に確認しましょう。
この機体特有のポイントとしては、折りたたむ時にこの線が引っ張られる(はず)なので、少し余裕を持つとよいでしょう。というか、折り畳んだ状態で配線してあげて、そのあと動かしてみて不自然に曲がったり引き延ばされたりしてないか確認してください。
ハンダづけ作業はこれだけです。あとは適当な部分にFCを載せて配線するのみ。この辺はレイアウトも自由だと思うので最早あんまりいうことがありません。配線はFCの公式等々参考が沢山あるので省略しますという建前ですが、写真を撮り忘れてるだけです。
ソフト設定
冒頭とタイトルで何の説明もなしに書いたcleanflightですが、FCのファームウェアおよび設定ソフトのことです。他にもbetaflightなどがありますが、この辺はそこまで詳しくないので割愛させていただきます。
ちなみにSPRacingF3はFCのハードウェアの名称です。他にNAZE32とかCC3Dとかありますが、使ったことがありません。
ということで、今回私の設定はcleanflight v2.5.0 での設定という事になります。私が参考にしたサイトはこちらがメインですが、cleanflightはv2.0.2です。後に挙げる仕様変更(とそれに伴う苦労)はv2.1.0からです。
数年後にこの記事が役に立つ保証がないことは予めここに記しておきます。飽きてなければ記事は都度更新しますので。
まずは普通にファームウェアの書き込み
手順通りですので、とりあえず割愛します。画像等を用意したら更新しますのでお待ちを。
設定等々①
こちらも同じく画像を用意しますのでお待ちを。
テスト飛行①
冒頭で載せた動画が初飛行です。そのあともう一度飛ばしたらこうなりました。

よくあることだと思いますので、羽は予備買いましょう。自分は買ってなかったので、1日ストップしちゃいました。
GPSの設定
ようやくこの記事のある意味の本題と言いますか、僕が一番悩んだところです。
結論から言いますと、私と同じものを用意して、普通に設定しているとできないはずです。出鼻を挫く形で申し訳ありません。結論から言うとファームウェアの書き込みからやり直すことになります。というか、カスタムファームウェアを作りこむところからスタートします。なんやねん。詳しくは追って書いていくので、興味がある方は引き続きお読み頂けますと幸いです。
さて、GPSの設定しましょうということで、手順通りまずはUART、シリアル通信の設定から行いましょう。cleanflightのportタブからUARTの2or3の行でセンサのボックス部分をGPSにして、通信速度はGPSに合わせてください。GPSも個別に設定しなきゃいけない可能性が大いにありますが、ここでも知識がないと躓く(というか躓いた)ので、後で述べます。見づらい記事で申し訳ありませんが徐々に構成も直しますので悪しからず。ちなみに設定をAUTOにすると何もつないでなくても57600にされるので、そういう仕様なのでしょう。
もう注意点が多すぎてどこから順に書いていくべきなのか迷走してますが、ここも注意点がありまして。基本的に通信速度は115200にしないようにしましょう。しなきゃいけない理由があるなら別ですが。なんでダメかというと、データが飛ぶという報告があるからです。公式にも書いてますので、目的がなければあえて選ぶ意味はないかと思います。
ようやく次の工程です。cleanflightに戻って、configurationタブに移って左下の方にあるGPSをONにしましょう。
、とここで設定を保存した方は違和感に気づくはずです。保存したはずなのに設定がONになりません。素人の私はパニックです。あきらめようかと思いました。てか2週間くらい悩み続けたわ。
んで原因ですが、少なくとも私は日本語の記事でこいつを見かけたことが有りません。ということで見つけた記事のスクショがこちら。

ほいで雑な訳がこちら(訳:DRB)
“flashの容量が不安な機体にはそもそも一部機能を書き込まないようにしたからな。もし使いたいなら自分でファームウェア作れよ。”
ということです。知らん。そんなの知らん。
これ日本語でこの手の悩みが挙がってないのはみんなflashに余裕たっぷりのFCでも使ってるということでしょうか。もうやだ。お金欲しい…とか思ってましたが、「ドローン GPS」とかで調べた時に上位に来るサイトが軒並みこの仕様変更より前の記事なんですよね。もうドローンやる人はおらんのでしょうか。もちろんレースとかでマイクロ機は需要増えてるのは知ってるんですけどね。
話を戻しまして、解決法として自分でカスタムファームウェア作ってね(はあと)と書かれていますのでやってあげましょう。このステップは懇切丁寧に書かれているので割と簡単にやれると思います。が別記事に書きますのでお待ちを。 (2020/01/14追記:書きました.大変長らくお待たせいたしました.)
適当に使わなそうな機能を削った私のやつで良ければ置いておきますので好きに使ってください。少なくともSPRacingF3 ACRO/DELUXE でGPSが動くのは確認済みです。
(2020/01/11更新:すっかり忘れてました.多分これが改造済のファームです.cleanflight_2.5.0_SPRACINGF3.hex GPSをONにしてリビルド)
できたら書き込んであげましょう。これは上で述べたのと手順は同じなので省略します。ファームウェアの選択で自分の作ったのを選ぶのだけ忘れないように。
これでGPSをONにできます。ようやくですね。
余談ですが、このあと私はさらに一悶着ありました。使ってるGPSモジュールの配線の色と、SPRacingF3に付属しているUART用の配線の色が全く同じなので油断してそのまま配線したらRXTXが入れ替わってました。PCと通信できてるのは確認済みだったので気づきましたが、それがなかったら一生悩んでた説あります。
ちなみにこちらの記事でOP-GPSなるものをSPRacingF3に接続していますが、少なくとも今のところ私はできていません。これも調べているうちに色々分かったのですが、本流から外れるのでここではパスします。こちらも短い記事にまとめようかと(もはや自分のため)
ようやく次なる設定へ(フライトモード)
上の流れで私が(クソしょうもない)紆余曲折に苦しんだことがお分かり頂けたかと思います。ということでこの設定は私もまだよくわかってません。
まず、一番使いたかったGPS_HOLDモードが消え去ってます。GPSが使えないから現れてないだけかと思いましたが、その希望はくだかれました。あ、ちなみにBARO(Altitude)モードもありません。つらい。
ここまで黙ってましたが、Aliexpressで購入したSPRcaingF3はACROだったため、BAROが存在せず、amazonで買いなおしたら余裕で動きました。まあこれに関しては予想してたんだけど…
余ったACROはマイクロ機の製作にでも回します。ほしい方がいれば差し上げますよー。
で、これらの機能はどこに行ったかという話ですが、PID設定のタブに行くと、しれっとGPSとBAROに対するPIDの設定項目があります。
…ここまでが進捗です。誰かここの仕様と設定値のサンプルがありましたら教えてください。
終わりに
これもうドローンは買った方が早いのでは?
という考えがよぎりますがそれは楽しくない。このグダグダ悩んでる時間も含めて趣味なのです。
ということにしときましょう。
私と同じところで無駄に躓く人が減ってくれれば(そもそもいるのか疑惑はありますが)幸いです。
ということで、他の設定とかも詳細が分かれば更新します。ではでは。
コメント