
どらびです.
本記事はシリーズものの3つ目の記事になりますので,以前のをご覧になっていない方はそちらもご参照いただければと思います.
ということで,今回は機構設計について書いていこうと思います.
機構設計
概要
まずは機構の大まかな設計について考えます.
とはいってもこの辺は前回,前々回の回路設計等である程度は決まっているはずです.
今回の場合は,ステッピングモータでセンサをスライドさせる機構が必要です.
中判カメラの要件に従ってストローク量が決定します.今回は6×4.5サイズということで,おおよそ60mmストロークが必要になります.
厳密に決めたい,あるいは筐体の制限等でギリギリのストローク量を設定したい場合は,ベースとなるカメラの開口部を計算して,それに合わせて寸法を決めるとよいと思います.
今回はストローク的には60㎜を想定しています.
今回は筐体のサイズについて,一部制限がありますが(ベースとなるカメラと干渉しない),最悪の場合はツライチ(接合部がピッタリ揃うようにすることです)を諦めればスペースは確保できるのであまり攻めていません(笑)
要件が決定したら部品選定に移ります.
今回,スライド部の部品としてigus社のドライリンNという製品を使おうと思っています.

これはリニアガイドなんですけど,ボールの転がりではなくて,樹脂の摺動で1軸のスライド軸受を実現しています.油を使わなくていいので,メンテ性が抜群に良さそうということで採用してみます.
リニアガイドなので精度も通常のフラッドベッドスキャナよりも向上すると思います.
スライド機構を用意できたら,あとは駆動側を作っていきます.
駆動側は,従来のスキャナ改造型では,スキャナの制御ソフトに合わせたギヤ比設定をしなければならないため,構造が確定してしまいます.ですが,今回は制御も含めて完全に自作するので,ここに関しては基本的にフリーです.ただ,駆動方式自体はスキャナと同じくベルト駆動がコスパの観点から最高だと思いますので,ベルト駆動にすることは決定しています.
で,その場合の制約として,今回のカメラは縦方向の1画素サイズが2μmなので,最高画質で撮影する場合は移動量の最小値もできれば2μmにするのがオススメです.
というわけでそれを実現するためのモーターやギアの選定を考えていきます.
駆動系選定のための計算
先程述べたように,今回作るカメラにおける駆動系制約は,”最小2μmのステップで動く”という事になります.
で,使用しているステッピングモータドライバは1/16マイクロステップに対応しているもの(知ってる人は知ってると思いますが,A4988です)で,サイズ制約からモータもすでに確定しています.
ベルトはひとまず入手性を考慮して2GTを利用することに決めてみます.
さらにさらに,先に設計できる部分を進めた結果,ベルト駆動部のスペース制約から,最集段のギアはMAXでも14歯位までしか入れられません.
これらを踏まえて計算していきます.減速機構を入れない場合,1ステップで進む量を示す式は次のようになります.なお,2GT用の14歯のギアを使うことを前提として以降計算を進めます.
機構設計
こちらに関しては,先程決定した仕様と,初期条件等の必須要件をクリアしつつ,筐体のサイズなど希望要件を可能な限り満たせるようにパーツを配置していきます.
ギアの構成については配置しながら実際にパターンをいくつか試してみました.最終案しか写真が残っていないので,それだけお見せするようにします.
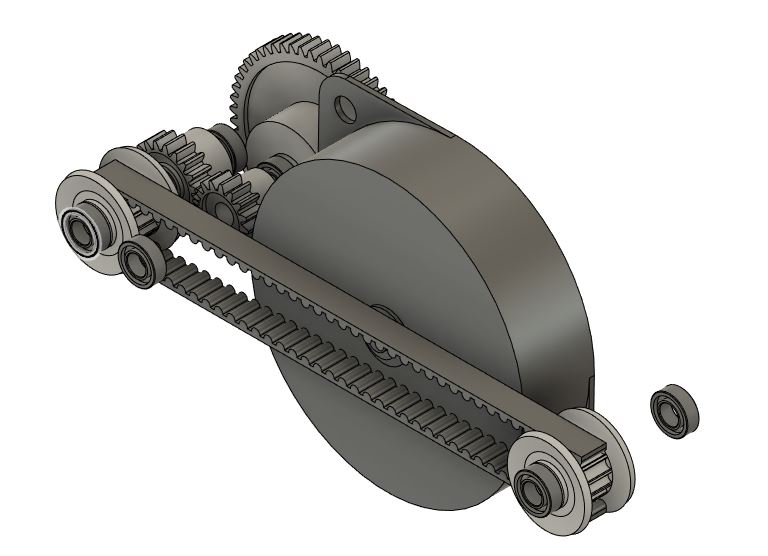
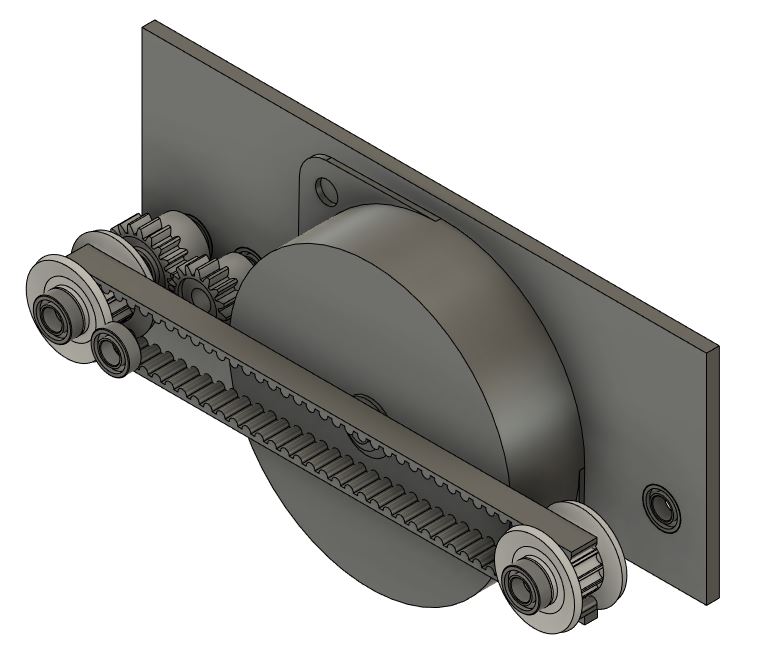
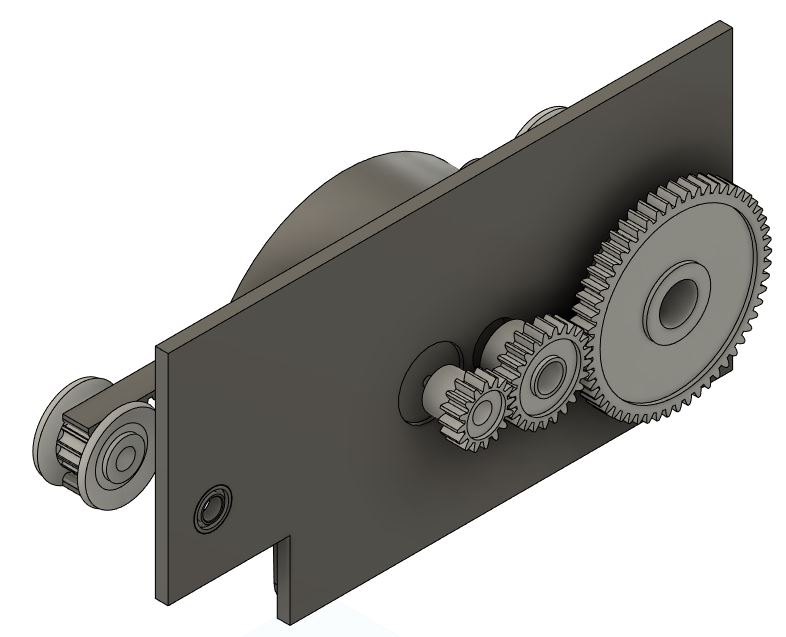
画像1枚目がギアとモータのみを表示したもので,2枚目以降はマウントパネルも込みの画像になります.
モータをマウントするパネルに対して,表裏両面にギアが配置されているところがかなり設計的に無理しつつ頑張ったポイントです(笑)
市販品しか使わない想定だとこうなります.ギアとか,ボス部分を削る,あるいは2段ギアを一体で造形できればもっと楽にできたと思いますが,大量に量産できるものなら利益も見込めるかもしれませんが,コレにそこまでの期待は現状できないので,何とかそれ以外の部分でカバーしたいところです.
機構設計まとめ
以上で基本的な機構部分の仕様が決定しましたので,次は実際に筐体の設計に入りたいと思います.
とは言いつつ,だいぶ前からギアボックスの仕様計算以外は殆ど終わっていて,前回の回路設計編でもチラっと載せていたように,ある程度の外観デザインはできています.
という事で次回は筐体の設計についてお見せできればと思います.
それでは~.


コメント